



Pneumatische Greifer - Wie sie funktionieren
Abbildung 1: pneumatische Greifer
Ein pneumatischer Greifer ist ein Pick-and-Place-Gerät, das die Greiferbacken, auch Finger genannt, mit Druckluft betätigt. Diese Finger, die den menschlichen Fingern ähneln, helfen beim Greifen, Halten und Loslassen der Werkstücke. In der Regel haben sie 2 Finger (parallel oder winklig) oder 3 Finger mit einem einfach oder doppelt wirkenden Zylinder zur Steuerung. Sie werden meist in automatisierten Fertigungsprozessen eingesetzt, um ein Werkstück zu greifen. Die Werkstücke können von kleinen Objekten wie Leiterplatten oder Chips bis hin zu großen Objekten wie einem Motorblock reichen. Abbildung 1 zeigt Beispiele von pneumatischen 2- und 3-Finger-Greifern.
Inhaltsübersicht
- Vorteile der pneumatischen Greifer
- Funktionsprinzip eines pneumatischen Greifers
- Pneumatische 2-Finger- und 3-Finger-Greifer
- Greifkraft
- Auswahlkriterium
- Anwendungen
Sehen Sie sich unsere Online-Auswahl an pneumatischen Greifern und Zylindern an!






Vorteile der pneumatischen Greifer
Zu den Vorteilen der pneumatischen Greifer gehören:
- Leichtes Gewicht
- Kostengünstig
- Hohe Greifkraft
- Fähigkeit, eine Vielzahl von Werkstückkonfigurationen zu greifen
- Einstellbare Greifkraft
Funktionsprinzip eines pneumatischen Greifers
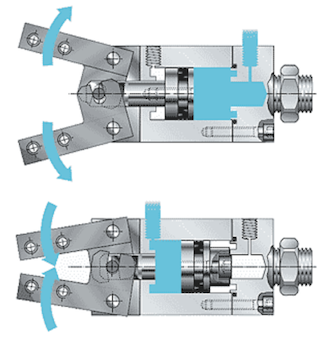
Abbildung 2: Funktionsprinzip des pneumatischen 2-Finger-Winkelgreifers
Der Greifer wird an das Druckluftnetz angeschlossen. Wenn die Druckluft in den Zylinder eingeleitet wird, treibt sie die Kolbenstange an. Die Kolbenstange ist mit den Greiffingern verbunden. Während der Luftdruck den Kolben auf- und abbewegt, öffnen oder schließen sich die Finger parallel oder in einem Winkel. Dieser Mechanismus kann im Pick-and-Place-Betrieb oder zur Änderung der Ausrichtung des Objekts verwendet werden.
Abbildung 2 zeigt das Funktionsprinzip eines pneumatischen 2-Finger-Winkelgreifers. Es handelt sich um eine Doppelzylinderkonstruktion. Wenn also Druckluft an den hinteren Zylinder angeschlossen wird (Abbildung 2 oben), drückt sie den Kolben nach vorne, wodurch sich die Finger des pneumatischen Greifers öffnen. Wenn Druckluft an den vorderen Zylinder angeschlossen wird (Abbildung 2 unten), drückt sie den Kolben nach hinten, wodurch die Finger des pneumatischen Greifers geschlossen werden.
Die pneumatischen Greifer können anhand der Bewegung der Greiffinger, des Greifmechanismus und der Konfigurationen kategorisiert werden. Die häufigsten werden im Folgenden erläutert:
Parallelgreifer
Wie der Name schon sagt, bewegt der Parallelgreifer seine Finger parallel zum Greiferkörper. Der Parallelgreifer ist der am häufigsten verwendete Greifertyp, da kundenspezifische Greifer leicht zu konstruieren sind und die Installation aufgrund der nur einen Bewegungsachse einfach ist. Sie können auch Werkstücke unterschiedlichster Form und Größe bearbeiten und Maßabweichungen ausgleichen. Abbildung 3 zeigt die Bewegung der Finger.
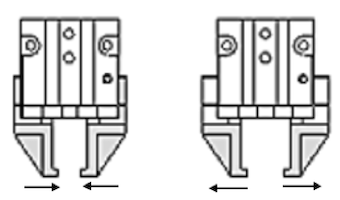
Abbildung 3: Pneumatische Parallelgreifer beim Schließen (links) und Öffnen (rechts)
Winkelgreifer
Der pneumatische Winkelgreifer kann seine Finger radial bewegen und um einen zentralen Drehpunkt öffnen und schließen. Sie werden häufig bei Anwendungen eingesetzt, bei denen nur wenig Platz zur Verfügung steht, da die Backen nach oben und aus dem Weg bewegt werden können. Diese Greifer sind gut geeignet, um große Werkstücke mit ungeraden Formen zu halten. Abbildung 2 zeigt die Bewegung der Finger.
Pneumatische 2-Finger- und 3-Finger-Greifer
Pneumatische 2-Finger-Greifer sind die am häufigsten verwendeten Greifer. Er bietet 2 Befestigungsmöglichkeiten für die Finger. Die Finger bewegen sich synchron und öffnen und schließen sich in Richtung der zentralen Achse des Greifers.
3-Finger-Greifer eignen sich hervorragend zur Handhabung runder Gegenstände und bieten mehr Greifkraft als 2-Finger-Greifer. Er bietet 3 Befestigungsmöglichkeiten für die Finger. Die Finger öffnen und schließen sich in Richtung der Mittelachse des Greiferkörpers. Die 3 Finger bieten im Vergleich zu 2-Finger-Greifern mehr Halt und genaue Zentrierung.
Äußeres und inneres Greifen
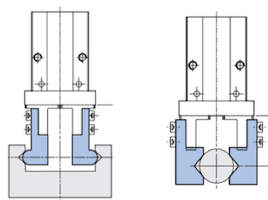
Abbildung 4: Arten von pneumatischen Greifern auf der Grundlage des Greifmechanismus: Innengreifen (links) und Außengreifen (rechts)
Je nach Art des Greifens können pneumatische Greifer als Innen-, Außen- oder kombinierte Greifer kategorisiert werden. Beispiele werden im Folgenden erörtert und in Abbildung 4 dargestellt.
- Internes Greifen: Innengreifer nutzen die Öffnungskraft, um das Teil zu halten, und greifen das Objekt über seine innere Oberfläche.
- Externes Greifen: Außengreifer nutzen die Schließkraft, um das Werkstück zu halten und greifen das Objekt von der Außenfläche aus. Es ist der häufigste Greifmechanismus.
- Kombiniertes Greifen: Verwendet eine Kombination aus Außen- und Innengreifer.
Einfachwirkende und doppeltwirkende Greifer
Die pneumatischen Greifer können einfach oder doppelt wirkend sein. Die einfachwirkenden pneumatischen Greifer enthalten eine Feder zur Unterstützung des Antriebs in einer Richtung (entweder Öffnen oder Schließen).
Pneumatische Greifer sind meist doppeltwirkend ausgelegt. Sie können durch Druckluft zum Öffnen und Schließen betätigt werden. Diese Funktion ermöglicht die Innen- und Außenklemmung. Die doppelt wirkenden Greifer können mit einer Federunterstützung ausgestattet sein, um das Werkstück zu halten, falls der Luftdruck ausfällt.
Magnetischer Greifer
Magnetgreifer sind für die Handhabung ferromagnetischer Gegenstände geeignet. Die Greifer sind in ihrem Kern mit Dauermagneten ausgestattet. Je nach Stärke des Magneten kann er für eine Vielzahl von Objektgrößen verwendet werden. Es ist jedoch zu beachten, dass Dauermagnete bei höheren Temperaturen (über 150°C) ihre magnetischen Eigenschaften verlieren.
Fingerform
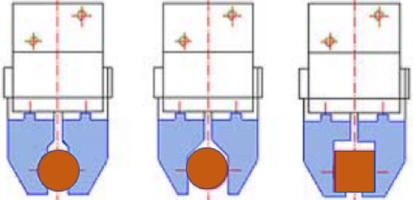
Abbildung 5: Form der Finger für pneumatische Greifer: umgreifend (links), Reibung (Mitte), Rückhaltung (rechts)
Im Allgemeinen nutzen die Finger des pneumatischen Greifers die Reibung für die Greifkraft. Diese Finger können aber auch alternativ gestaltet werden, um die für die Anwendung erforderliche Größe und Greifkraft zu verringern. Die umschließende und zurückhaltende Form erhöht die Stabilität und verringert die für den Griff erforderliche Kraft. Abbildung 5 zeigt einige gängige Beispiele für verschiedene Fingerformen.
Wiederholbarkeit:
Die Wiederholgenauigkeit ist das Maß für die maximale Positionsgenauigkeit, die der Greifer erreichen kann. Die pneumatischen Greifer können je nach Anzahl der Finger und der Arbeitsgeschwindigkeit eine unterschiedliche Wiederholgenauigkeit aufweisen. Die Wiederholbarkeit muss also auf der Grundlage der für die Anwendung erforderlichen Präzision bestimmt werden.
Greifkraft
Die Greifkraft ist die Kraft, die von den Greiferfingern auf das Werkstück ausgeübt wird. Diese Kraft kann je nach Luftdruck, Reibungskoeffizient und Greifbedingungen zwischen den Fingern und dem Werkstück unterschiedlich sein. Die Greifkraft für reines Reibungshalten, wenn das Werkstück beim Greifen nicht absinkt, wird wie folgt berechnet:

Wo:
- F = Greifkraft eines einzelnen Fingers (N)
- m = Masse des Werkstücks (kg)
- g = Erdbeschleunigung (9,81 m/s²)
- a = Beschleunigung aus dynamischer Bewegung (m/s2)
- n = Anzahl der Finger (n=2 für Zwei-Finger-Greifer; n=3 für Drei-Finger-Greifer)
- μ = Reibungskoeffizient
- S = Sicherheitsfaktor
Wenn Ihr Fingerdesign und Ihre Methode zum Greifen des Objekts anders ist als nur durch Reibung, kann eine andere Formel für die Greifkraft erforderlich sein.
Reibungskoeffizient
Nachstehend finden Sie eine Tabelle mit den Reibungskoeffizienten gängiger Materialien. Diese Zahlen sind jedoch nur ein erster Anhaltspunkt, da sie bei jeder Anwendung anders ausfallen und überprüft werden sollten.
| Material des Werkstücks | Material der Backen | Reibungskoeffizient μ |
| Stahl | Stahl | 0,25 |
| Stahl | Aluminum | 0.35. |
| Stahl | Kunststoff | 0.50. |
| Aluminum | Aluminum | 0.49 |
| Aluminum | Kunststoff | 0.70 |
| Kunststoff | Kunststoff | 1 |
Sicherheitsfaktor
Dies ist lediglich eine Empfehlung, und der Sicherheitsfaktor für Ihre spezielle Anwendung kann unterschiedlich sein:
- 2 - für normalen Gebrauch
- 3 - für Bewegung in mehrere Richtungen
- 4 - für Stöße, schnelle Beschleunigungen oder Abbremsungen
Montageoptionen
Die Befestigungslöcher befinden sich an der Unterseite, der Seite und der Vorderseite des Greifers und bieten sichere Befestigungsmöglichkeiten. In Abbildung 6 unten stellen A, C und D die Befestigungslöcher dar. Je nach Anwendung können beide Seiten für die Montage gewählt werden. Die Luftanschlüsse werden durch B dargestellt.
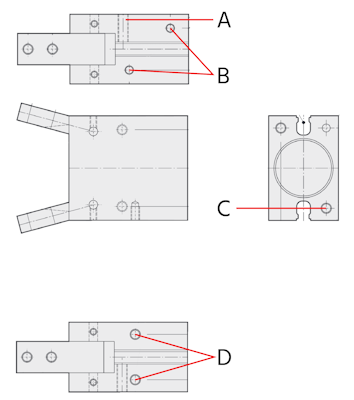
Abbildung 6: Befestigungsmöglichkeiten für 2-Finger-Winkelgreifer: Befestigungslöcher (A, C, D) und Luftanschluss (B).
Sensoren
Neben pneumatischen Greifern können Sensoren installiert werden, um die Arbeitsposition der Finger zu überwachen und zu steuern. An den pneumatischen Greifern können Sensorschalter oder Näherungsschalter installiert werden. Sie können, wie in Abbildung 7 dargestellt, in die Nuten des Gehäuses eingesetzt werden. Diese Sensoren können die offene oder geschlossene Position der Finger erkennen. Näherungssensoren können die Nähe eines Objekts erkennen und die Informationen an das Steuergerät weiterleiten.
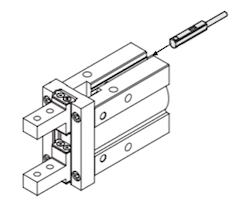
Abbildung 7: Installation des Sensorschalters
Auswahlkriterium
- Greifkraft: Die effektive Greifkraft kann anhand der Formel in diesem Artikel berechnet werden.
- Gewicht des Werkstücks: Die Greifkraft muss in der Lage sein, das Gewicht des Werkstücks während des Vorgangs zu tragen.
- Luftdruck: Der Luftdruck sollte berücksichtigt werden, da er sich direkt auf die Greifkraft auswirkt und die Größe des Greifers beeinflusst.
- Konfiguration des Werkstücks: Anhand der Form des Werkstücks lässt sich feststellen, ob 2 oder 3 Fingergreifer verwendet werden können. 2-Finger-Greifer sind weit verbreitet und können für eine Vielzahl von Gegenständen verwendet werden. Die 3-Finger-Greifer sind für runde oder zylindrische Gegenstände geeignet.
- Typ des Greifers: Je nach Werkstück kann der Greifer einen Außen- oder Innengriff haben.
- Umwelt: Pneumatische Greifer sollten unter Berücksichtigung der Betriebsumgebung ausgewählt werden. Greifer, die für saubere Umgebungen konzipiert sind, können in rauen Umgebungen versagen.
Anwendungen
Die pneumatischen Greifer werden häufig in den folgenden Branchen eingesetzt:
- Robotik
- Herstellung medizinischer Geräte
- Pharmazeutische und biotechnologische Industrie
- Kunststoffspritzguss und -einspritzung
- Verarbeitung im Labor
- Automatisierung





